자동제어 궤한 루프 제거 포스팅입니다.
이번엔 자동제어 중에서 궤한 (Feedback loop)를 제거하는 방법을 서술하고자 한다.
아마 공학도 중에서 기계 공학, 혹은 전자 공학을 공부하는 사람들이라면 수식이 간단히 정리되는 방법을 모를 것 같다. 보통 대충하고 넘거가거든. 보통 결과만 알려주는 경우가 많다보니 그럴 것이다.
병렬의 경우 그냥 더하면 되니까 넘어가고, 피드백만 다루겠다.

통상 공부를 하면 나오는 루프는 위와 같다. 그냥 수식만 정리해주는 경우가 많다.
이번에는 이 수식을 정리해보려고 한다.

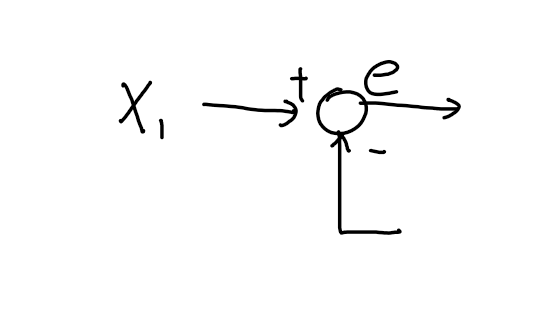
피드백의 경우 보통 센서에 출력된 결과를 빼는 경우가 많다. 그래서 -의 경우를 짚어보겠다.
입력이 X1이고 피드백이 된 데이터를 -한 결과를 e(error)라고 하겠다.
e로 설정하고 수식을 전개하면 전달함수를 간단히 정리할 수 있다.
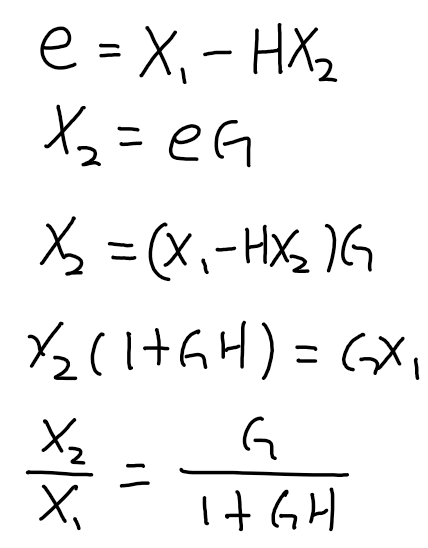
error는 입력 – 출력 데이터*H한것과 같다. 그리고 출력 데이터는 error*G한 것과 같다.
그래서 수식을 정리하면 간단하게 전달함수를 구할 수 있는 것이다.
여기까지 잘 따라왔다면 분기점 재배치를 한번 짚어보자.
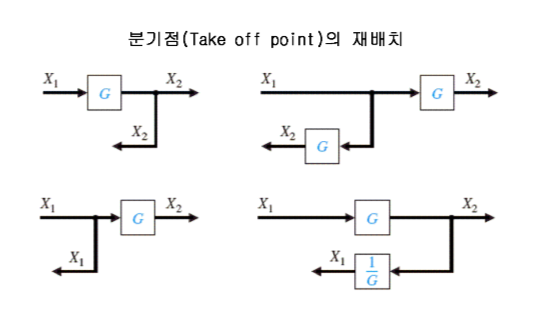
좌측 상단은 우측 상단으로 변환 가능하고, 좌측 하단은 우측 하단과 같이 변환이 가능하다. 이 개념을 한번 짚어보고 이해를 했다면 아래의 문제를 정리해보자.

분극만 처리할 수 있다면 위의 문제는 비교적 쉽게 정리할 수 있다.
먼저 G4를 먼저 분극 처리하자.

그러면 파란 박스 안의 루프를 처리할 수 있다. 파란색의 루프를 수식을 전개하여 정리하자. 파란색 박스 입장에서 바라보는 입력을 X1으로 두고, Error를 설정한다.
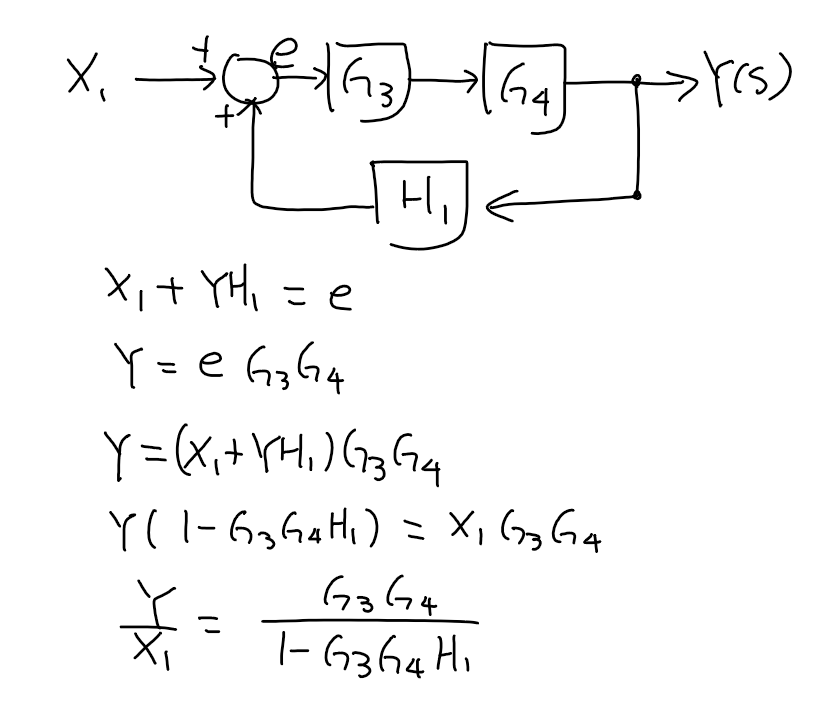
수식을 정리하면 전달함수 하나로 표현할 수 있다. 이 모형을 대체하여 블록도를 그리고 궤환을 또 정리해보자.

이 빨간색의 루프를 그리고 다시 정리해보자. 입력을 X2로 설정하고 Error를 e2로 설정하였다.
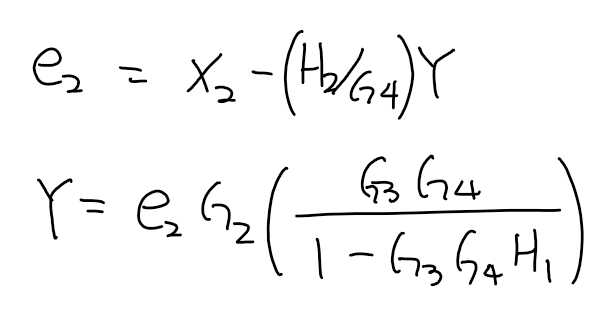
basic form으로 수식을 적어두고 정리하자.

최종적으로 수식을 정리한다면 빨간 박스와 같다.
위 수식을 다시 블록도로 대체하여 그림을 그린 후 최종적으로 수식을 정리해보자.

발생하는 에러를 e3로 선언하고 최종적으로 정리하자.
분수가 너무 복잡해서 알파로 변수지정하고 수식을 정리했다.

따라서 위와 같이 수식이 나왔으므로 최종적인 전달함수를 그림그리면 아래와 같다.
